|
Medical Imaging Interaction Toolkit
2016.11.0
Medical Imaging Interaction Toolkit
|
|
Medical Imaging Interaction Toolkit
2016.11.0
Medical Imaging Interaction Toolkit
|
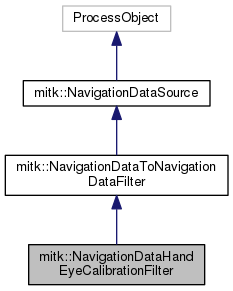
IGT filter applying a Hand-Eye transformation to a given BaseData according to the current NavigationDataTransformation. The resulting BaseData is then given in tracking coordinates. More...
#include <mitkNavigationDataHandEyeCalibrationFilter.h>

Public Types | |
| typedef itk::QuaternionRigidTransform< ScalarType > | QuaternionRigidTransformType |
| transformation type for itk::QuaternionRigidTransforms More... | |
Public Member Functions | |
| mitkClassMacro (NavigationDataHandEyeCalibrationFilter, NavigationDataToNavigationDataFilter) | |
| Pointer | Clone () const |
| void | SetObjectToTransform (unsigned int index, BaseData *data) |
| Set the object that will be transformed to tracking coordinates using the current NavigationData and the given transformation of the HandEyeCalibration. More... | |
| void | SetHandEyeTransformation (unsigned int index, Transform::Pointer handEyeTransform) |
| Set the transformation of the HandEyeCalibration that should be applied to the BaseData with the current transformation of the Navigation Data. More... | |
| virtual void | GenerateData () override |
 Public Member Functions inherited from mitk::NavigationDataToNavigationDataFilter Public Member Functions inherited from mitk::NavigationDataToNavigationDataFilter | |
| mitkClassMacro (NavigationDataToNavigationDataFilter, NavigationDataSource) | |
| virtual void | SetInput (const NavigationData *nd) |
| Set the input of this filter. More... | |
| virtual void | SetInput (unsigned int idx, const NavigationData *nd) |
| Set input with id idx of this filter. More... | |
| const NavigationData * | GetInput (void) const |
| Get the input of this filter. More... | |
| const NavigationData * | GetInput (unsigned int idx) const |
| Get the input with id idx of this filter. More... | |
| const NavigationData * | GetInput (std::string navDataName) const |
| Get the input with name navDataName of this filter. More... | |
| DataObjectPointerArraySizeType | GetInputIndex (std::string navDataName) |
| return the index of the input with name navDataName, throw std::invalid_argument exception if that name was not found More... | |
| virtual void | ConnectTo (mitk::NavigationDataSource *UpstreamFilter) |
| Connects the input of this filter to the outputs of the given NavigationDataSource. More... | |
| Public Member Functions inherited from mitk::NavigationDataSource | |
| mitkClassMacroItkParent (NavigationDataSource, itk::ProcessObject) | |
| virtual std::string | GetName () |
| virtual void | SetName (std::string _arg) |
| Sets the human readable name of this source. There is also a default name, but you can use this method if you need to define it on your own. More... | |
| NavigationData * | GetOutput (void) |
| return the output (output with id 0) of the filter More... | |
| NavigationData * | GetOutput (DataObjectPointerArraySizeType idx) |
| return the output with id idx of the filter More... | |
| NavigationData * | GetOutput (const std::string &navDataName) |
| return the output with name navDataName of the filter More... | |
| DataObjectPointerArraySizeType | GetOutputIndex (std::string navDataName) |
| return the index of the output with name navDataName, -1 if no output with that name was found More... | |
| virtual void | RegisterAsMicroservice () |
| Registers this object as a Microservice, making it available to every module and/or plugin. To unregister, call UnregisterMicroservice(). More... | |
| virtual void | UnRegisterMicroservice () |
| Registers this object as a Microservice, making it available to every module and/or plugin. More... | |
| std::string | GetMicroserviceID () |
| Returns the id that this device is registered with. The id will only be valid, if the NavigationDataSource has been registered using RegisterAsMicroservice(). More... | |
| virtual void | GraftNthOutput (unsigned int idx, itk::DataObject *graft) |
| Graft the specified DataObject onto this ProcessObject's output. More... | |
| virtual void | GraftOutput (itk::DataObject *graft) |
| Graft the specified DataObject onto this ProcessObject's output. More... | |
| virtual itk::DataObject::Pointer | MakeOutput (DataObjectPointerArraySizeType idx) override |
| virtual itk::DataObject::Pointer | MakeOutput (const DataObjectIdentifierType &name) override |
| virtual void | SetParameters (const mitk::PropertyList *) |
| Set all filter parameters as the PropertyList p. More... | |
| virtual mitk::PropertyList::ConstPointer | GetParameters () const |
| Get all filter parameters as a PropertyList. More... | |
| virtual void | Freeze () |
| virtual void | UnFreeze () |
| virtual bool | GetIsFrozen () |
Static Public Member Functions | |
| static Pointer | New () |
Protected Member Functions | |
| NavigationDataHandEyeCalibrationFilter () | |
| Constructor. More... | |
| ~NavigationDataHandEyeCalibrationFilter () | |
| Destructor. More... | |
| Protected Member Functions inherited from mitk::NavigationDataToNavigationDataFilter | |
| NavigationDataToNavigationDataFilter () | |
| virtual | ~NavigationDataToNavigationDataFilter () |
| void | CreateOutputsForAllInputs () |
| Create an output for each input. More... | |
| Protected Member Functions inherited from mitk::NavigationDataSource | |
| NavigationDataSource () | |
| virtual | ~NavigationDataSource () |
Protected Attributes | |
| std::map< int, BaseData::Pointer > | m_ObjectsToTransform |
| Map of the BaseDatas that should be transformed. More... | |
| std::map< int, Transform::Pointer > | m_HandEyeTransformations |
| Map of the hand-eye transformations that should be applied to the BaseDatas. More... | |
| Protected Attributes inherited from mitk::NavigationDataSource | |
| std::string | m_Name |
| bool | m_IsFrozen |
Additional Inherited Members | |
| Static Public Attributes inherited from mitk::NavigationDataSource | |
| static const std::string | US_INTERFACE_NAME |
| These Constants are used in conjunction with Microservices. More... | |
| static const std::string | US_PROPKEY_DEVICENAME |
| static const std::string | US_PROPKEY_ID |
| static const std::string | US_PROPKEY_ISACTIVE |
IGT filter applying a Hand-Eye transformation to a given BaseData according to the current NavigationDataTransformation. The resulting BaseData is then given in tracking coordinates.
Inputs: NavigationData(s), object(s) to transform (BaseData), hand-eye transformation (itk::QuaternionRigidTransform)
Derived from NavigationDataToNavigationDataFilter
Definition at line 39 of file mitkNavigationDataHandEyeCalibrationFilter.h.
| typedef itk::QuaternionRigidTransform<ScalarType> mitk::NavigationDataHandEyeCalibrationFilter::QuaternionRigidTransformType |
transformation type for itk::QuaternionRigidTransforms
Definition at line 50 of file mitkNavigationDataHandEyeCalibrationFilter.h.
|
protected |
Constructor.
Definition at line 21 of file mitkNavigationDataHandEyeCalibrationFilter.cpp.
|
protected |
Destructor.
Definition at line 28 of file mitkNavigationDataHandEyeCalibrationFilter.cpp.
| Pointer mitk::NavigationDataHandEyeCalibrationFilter::Clone | ( | ) | const |
|
overridevirtual |
| mitk::NavigationDataHandEyeCalibrationFilter::mitkClassMacro | ( | NavigationDataHandEyeCalibrationFilter | , |
| NavigationDataToNavigationDataFilter | |||
| ) |
|
static |
| void mitk::NavigationDataHandEyeCalibrationFilter::SetHandEyeTransformation | ( | unsigned int | index, |
| Transform::Pointer | handEyeTransform | ||
| ) |
Set the transformation of the HandEyeCalibration that should be applied to the BaseData with the current transformation of the Navigation Data.
| index | index corresponding to the NavigationData applied with this hand-eye transformation |
| handEyeTransform | transformation of a previously performed hand-eye calibration corresponding to the NavigationData at index |
Definition at line 39 of file mitkNavigationDataHandEyeCalibrationFilter.cpp.
| void mitk::NavigationDataHandEyeCalibrationFilter::SetObjectToTransform | ( | unsigned int | index, |
| BaseData * | data | ||
| ) |
Set the object that will be transformed to tracking coordinates using the current NavigationData and the given transformation of the HandEyeCalibration.
| index | index corresponding to the NavigationData and hand-eye transformation to be applied to this BaseData |
| data | BaseData to be associated to the index |
Definition at line 34 of file mitkNavigationDataHandEyeCalibrationFilter.cpp.
|
protected |
Map of the hand-eye transformations that should be applied to the BaseDatas.
Definition at line 93 of file mitkNavigationDataHandEyeCalibrationFilter.h.
|
protected |
Map of the BaseDatas that should be transformed.
Definition at line 89 of file mitkNavigationDataHandEyeCalibrationFilter.h.
 1.8.9.1
1.8.9.1 
