Interface to the Time-of-Flight (ToF) camera PMD CamBoard. More...
#include <mitkToFCameraPMDCamBoardController.h>
Public Member Functions | |
| mitkClassMacro (ToFCameraPMDCamBoardController, ToFCameraPMDController) | |
| Pointer | Clone () const |
| virtual bool | OpenCameraConnection () |
| opens a connection to the ToF camera and initializes the hardware specific members More... | |
| bool | SetDistanceOffset (float offset) |
| sets an additional distance offset which will be added to all distance values. More... | |
| float | GetDistanceOffset () |
| returns the currently applied distance offset in m More... | |
| bool | SetRegionOfInterest (unsigned int leftUpperCornerX, unsigned int leftUpperCornerY, unsigned int width, unsigned int height) |
| Setting the region of interest, the camera is configured to only output a certain area of the image. More... | |
| bool | SetRegionOfInterest (unsigned int roi[4]) |
| Setting the region of interest, the camera is configured to only output a certain area of the image. More... | |
| unsigned int * | GetRegionOfInterest () |
| returns the region of interest currently set More... | |
| bool | SetFieldOfView (float fov) |
| Sets the field of view of the camera lens. More... | |
 Public Member Functions inherited from mitk::ToFCameraPMDController Public Member Functions inherited from mitk::ToFCameraPMDController | |
| mitkClassMacroItkParent (ToFCameraPMDController, itk::Object) | |
| virtual bool | CloseCameraConnection () |
| closes the connection to the camera More... | |
| virtual bool | GetAmplitudes (float *amplitudeArray) |
| Gets the current amplitude array from the device. More... | |
| virtual bool | GetAmplitudes (char *sourceData, float *amplitudeArray) |
| Calculates the current amplitude data from the raw source data using the processing plugin of the PMDSDK. More... | |
| virtual bool | GetIntensities (float *intensityArray) |
| Gets the current intensity array from the device. More... | |
| virtual bool | GetIntensities (char *sourceData, float *intensityArray) |
| Calculates the current intensity data from the raw source data using the processing plugin of the PMDSDK. More... | |
| virtual bool | GetDistances (float *distanceArray) |
| Gets the current distance array from the device. More... | |
| virtual bool | GetDistances (char *sourceData, float *distanceArray) |
| Calculates the current distance data from the raw source data using the processing plugin of the PMDSDK. More... | |
| virtual bool | GetSourceData (char *sourceDataArray) |
| Gets the PMD raw data from the ToF device. More... | |
| bool | GetShortSourceData (short *sourceData) |
| Convenience method to get the PMD raw data from the ToF device as short array. More... | |
| virtual bool | UpdateCamera () |
| calls update on the camera -> a new ToF-image is aquired More... | |
| virtual int | GetModulationFrequency () |
| Returns the currently set modulation frequency. More... | |
| virtual int | SetModulationFrequency (unsigned int modulationFrequency) |
| Sets the modulation frequency of the ToF device. The method automatically calculates a valid value from the given frequency to make sure that only valid frequencies are used. More... | |
| virtual int | GetIntegrationTime () |
| Returns the currently set integration time. More... | |
| virtual int | SetIntegrationTime (unsigned int integrationTime) |
| Sets the integration time of the ToF device. The method automatically calculates a valid value from the given integration time to make sure that only valid times are used. More... | |
| virtual void | SetInputFileName (std::string inputFileName) |
| set input file name used by PMD player classes More... | |
| virtual unsigned int | GetCaptureWidth () |
| Access the resolution of the image in x direction. More... | |
| virtual unsigned int | GetCaptureHeight () |
| Access the resolution of the image in y direction. More... | |
| virtual unsigned int | GetInternalCaptureWidth () |
| Access the chosen width of the resulting image in x direction. More... | |
| virtual unsigned int | GetInternalCaptureHeight () |
| Access the chosen width of the resulting image in y direction. More... | |
| virtual int | GetSourceDataStructSize () |
Static Public Member Functions | |
| static Pointer | New () |
Protected Member Functions | |
| ToFCameraPMDCamBoardController () | |
| ~ToFCameraPMDCamBoardController () | |
| virtual void | TransformCameraOutput (float *in, float *out, bool isDist) |
| Protected Member Functions inherited from mitk::ToFCameraPMDController | |
| ToFCameraPMDController () | |
| ~ToFCameraPMDController () | |
| bool | ErrorText (int error) |
| Method printing the current error message to the console and returning whether the previous command was successful. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from mitk::ToFCameraPMDController | |
| char | m_PMDError [128] |
| member holding the current error text More... | |
| int | m_PMDRes |
| holds the current result message provided by PMD More... | |
| int | m_PixelNumber |
| holds the number of pixels contained in the image More... | |
| int | m_NumberOfBytes |
| holds the number of bytes contained in the image More... | |
| unsigned int | m_CaptureWidth |
| holds the width of the image in pixel as it is originally acquired by the camera More... | |
| unsigned int | m_CaptureHeight |
| holds the height of the image in pixel as it is originally acquired by the camera More... | |
| unsigned int | m_InternalCaptureWidth |
| holds the width of the image in pixel as it is requested by the user (cf. TransformCameraOutput()) Default: m_CaptureWidth More... | |
| unsigned int | m_InternalCaptureHeight |
| holds the height of the image in pixel as is it requested by the user (cf. TransformCameraOutput()) Default: m_CaptureHeight More... | |
| int | m_SourceDataSize |
| size of the original PMD source data More... | |
| int | m_SourceDataStructSize |
| size of the PMD source data struct and the PMD source data More... | |
| bool | m_ConnectionCheck |
| flag showing whether the camera is connected (true) or not (false) More... | |
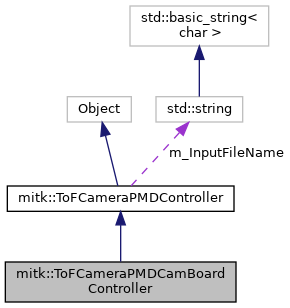
| std::string | m_InputFileName |
| input file name used by PMD player classes More... | |
| char * | m_SourcePlugin |
| holds name of source plugin to be loaded (e.g. camcube3.W64.pap for CamCube 3.0 on Win64 platform) More... | |
| char * | m_SourceParam |
| holds source parameter(s) More... | |
| char * | m_ProcPlugin |
| holds name of processing plugin to be loaded (e.g. camcubeproc.W64.pap for CamCube 3.0 on Win64 platform) More... | |
| char * | m_ProcParam |
| holds processing parameter(s) More... | |
Detailed Description
Interface to the Time-of-Flight (ToF) camera PMD CamBoard.
Definition at line 30 of file mitkToFCameraPMDCamBoardController.h.
Constructor & Destructor Documentation
◆ ToFCameraPMDCamBoardController()
|
protected |
◆ ~ToFCameraPMDCamBoardController()
|
protected |
Member Function Documentation
◆ Clone()
| Pointer mitk::ToFCameraPMDCamBoardController::Clone | ( | ) | const |
◆ GetDistanceOffset()
| float mitk::ToFCameraPMDCamBoardController::GetDistanceOffset | ( | ) |
returns the currently applied distance offset in m
◆ GetRegionOfInterest()
| unsigned int* mitk::ToFCameraPMDCamBoardController::GetRegionOfInterest | ( | ) |
returns the region of interest currently set
- Returns
- currently set region of interest.
◆ mitkClassMacro()
| mitk::ToFCameraPMDCamBoardController::mitkClassMacro | ( | ToFCameraPMDCamBoardController | , |
| ToFCameraPMDController | |||
| ) |
◆ New()
|
static |
◆ OpenCameraConnection()
|
virtual |
opens a connection to the ToF camera and initializes the hardware specific members
- Returns
- returns whether the connection was successful (true) or not (false)
Implements mitk::ToFCameraPMDController.
◆ SetDistanceOffset()
| bool mitk::ToFCameraPMDCamBoardController::SetDistanceOffset | ( | float | offset | ) |
sets an additional distance offset which will be added to all distance values.
- Parameters
-
offset offset in m
◆ SetFieldOfView()
| bool mitk::ToFCameraPMDCamBoardController::SetFieldOfView | ( | float | fov | ) |
Sets the field of view of the camera lens.
- Parameters
-
fov field of view in degrees. The default value is 40 degrees.
◆ SetRegionOfInterest() [1/2]
| bool mitk::ToFCameraPMDCamBoardController::SetRegionOfInterest | ( | unsigned int | leftUpperCornerX, |
| unsigned int | leftUpperCornerY, | ||
| unsigned int | width, | ||
| unsigned int | height | ||
| ) |
Setting the region of interest, the camera is configured to only output a certain area of the image.
- Parameters
-
leftUpperCornerX x value of left upper corner of region leftUpperCornerY y value of left upper corner of region width width of region height height of region
◆ SetRegionOfInterest() [2/2]
| bool mitk::ToFCameraPMDCamBoardController::SetRegionOfInterest | ( | unsigned int | roi[4] | ) |
Setting the region of interest, the camera is configured to only output a certain area of the image.
- Parameters
-
roi region of interest. roi[0]: x value of left upper corner, roi[1]: y value of left upper corner, roi[2]: width, roi[3]: height
◆ TransformCameraOutput()
|
protectedvirtual |
Implements mitk::ToFCameraPMDController.
The documentation for this class was generated from the following file:
