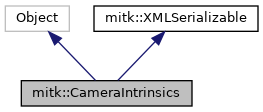
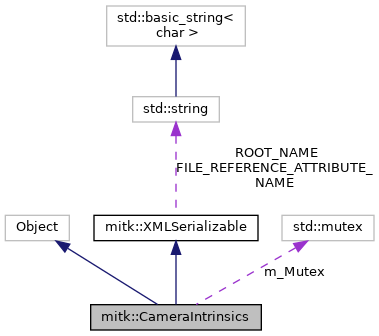
class representing camera intrinsics and related functions
More...
#include <mitkCameraIntrinsics.h>
|
| | mitkClassMacroItkParent (CameraIntrinsics, itk::Object) |
| |
| Pointer | Clone () const |
| |
| void | Copy (const CameraIntrinsics *other) |
| |
| bool | Equals (const CameraIntrinsics *other) const |
| |
| vnl_matrix_fixed< mitk::ScalarType, 3, 3 > | GetVnlCameraMatrix () const |
| |
| vnl_matrix_fixed< mitk::ScalarType, 3, 4 > | GetVnlCameraMatrix3x4 () const |
| |
| bool | IsValid () const |
| |
| void | SetValid (bool valid) |
| |
| cv::Mat | GetCameraMatrix () const |
| |
| cv::Mat | GetDistorsionCoeffs () |
| |
| cv::Mat | GetDistorsionCoeffs () const |
| |
| void | ToXML (tinyxml2::XMLElement *elem) const override |
| |
| std::string | ToString () const |
| |
| std::string | GetString () |
| |
| double | GetFocalLengthX () const |
| |
| double | GetFocalLengthY () const |
| |
| double | GetPrincipalPointX () const |
| |
| double | GetPrincipalPointY () const |
| |
| mitk::Point4D | GetDistorsionCoeffsAsPoint4D () const |
| |
| mitk::Point3D | GetFocalPoint () const |
| |
| mitk::Point3D | GetPrincipalPoint () const |
| |
| vnl_vector_fixed< mitk::ScalarType, 2 > | GetFocalPointAsVnlVector () const |
| |
| vnl_vector_fixed< mitk::ScalarType, 2 > | GetPrincipalPointAsVnlVector () const |
| |
| void | SetCameraMatrix (const vnl_matrix_fixed< mitk::ScalarType, 3, 3 > &_CameraMatrix) |
| |
| void | SetIntrinsics (const cv::Mat &_CameraMatrix, const cv::Mat &_DistorsionCoeffs) |
| |
| void | SetFocalLength (double x, double y) |
| |
| void | SetPrincipalPoint (double x, double y) |
| |
| void | SetDistorsionCoeffs (double k1, double k2, double p1, double p2) |
| |
| void | SetIntrinsics (const mitk::Point3D &focalPoint, const mitk::Point3D &principalPoint, const mitk::Point4D &distortionCoefficients) |
| |
| void | FromXML (const tinyxml2::XMLElement *elem) override |
| |
| void | FromGMLCalibrationXML (const tinyxml2::XMLElement *elem) |
| |
| std::string | ToOctaveString (const std::string &varName="CameraIntrinsics") |
| |
| | ~CameraIntrinsics () override |
| |
| virtual const char * | GetNameOfClass () const =0 |
| |
| virtual void | ToXMLFile (const std::string &file, const std::string &elemName="") |
| |
| virtual void | FromXMLFile (const std::string &file, const std::string &elemName="") |
| |
| std::string | GetXMLFileName () const |
| |
class representing camera intrinsics and related functions
Definition at line 35 of file mitkCameraIntrinsics.h.
◆ ~CameraIntrinsics()
| mitk::CameraIntrinsics::~CameraIntrinsics |
( |
| ) |
|
|
override |
◆ CameraIntrinsics() [1/2]
| mitk::CameraIntrinsics::CameraIntrinsics |
( |
| ) |
|
|
protected |
◆ CameraIntrinsics() [2/2]
◆ Clone()
| Pointer mitk::CameraIntrinsics::Clone |
( |
| ) |
const |
make a clone of this intrinsics
◆ Copy()
copy information from other to this
◆ Equals()
checks two intrinsics for equality
◆ FromGMLCalibrationXML()
| void mitk::CameraIntrinsics::FromGMLCalibrationXML |
( |
const tinyxml2::XMLElement * |
elem | ) |
|
◆ FromXML()
| void mitk::CameraIntrinsics::FromXML |
( |
const tinyxml2::XMLElement * |
elem | ) |
|
|
overridevirtual |
◆ GetCameraMatrix()
| cv::Mat mitk::CameraIntrinsics::GetCameraMatrix |
( |
| ) |
const |
◆ GetDistorsionCoeffs() [1/2]
| cv::Mat mitk::CameraIntrinsics::GetDistorsionCoeffs |
( |
| ) |
|
◆ GetDistorsionCoeffs() [2/2]
| cv::Mat mitk::CameraIntrinsics::GetDistorsionCoeffs |
( |
| ) |
const |
◆ GetDistorsionCoeffsAsPoint4D()
| mitk::Point4D mitk::CameraIntrinsics::GetDistorsionCoeffsAsPoint4D |
( |
| ) |
const |
◆ GetFocalLengthX()
| double mitk::CameraIntrinsics::GetFocalLengthX |
( |
| ) |
const |
◆ GetFocalLengthY()
| double mitk::CameraIntrinsics::GetFocalLengthY |
( |
| ) |
const |
◆ GetFocalPoint()
◆ GetFocalPointAsVnlVector()
| vnl_vector_fixed<mitk::ScalarType, 2> mitk::CameraIntrinsics::GetFocalPointAsVnlVector |
( |
| ) |
const |
◆ GetPrincipalPoint()
| mitk::Point3D mitk::CameraIntrinsics::GetPrincipalPoint |
( |
| ) |
const |
◆ GetPrincipalPointAsVnlVector()
| vnl_vector_fixed<mitk::ScalarType, 2> mitk::CameraIntrinsics::GetPrincipalPointAsVnlVector |
( |
| ) |
const |
◆ GetPrincipalPointX()
| double mitk::CameraIntrinsics::GetPrincipalPointX |
( |
| ) |
const |
◆ GetPrincipalPointY()
| double mitk::CameraIntrinsics::GetPrincipalPointY |
( |
| ) |
const |
◆ GetString()
| std::string mitk::CameraIntrinsics::GetString |
( |
| ) |
|
◆ GetVnlCameraMatrix()
| vnl_matrix_fixed<mitk::ScalarType, 3, 3> mitk::CameraIntrinsics::GetVnlCameraMatrix |
( |
| ) |
const |
- Returns
- the intrinsic parameter matrix as a 3x3 vnl matrix
◆ GetVnlCameraMatrix3x4()
| vnl_matrix_fixed<mitk::ScalarType, 3, 4> mitk::CameraIntrinsics::GetVnlCameraMatrix3x4 |
( |
| ) |
const |
- Returns
- the intrinsic parameter matrix as a 3x4 vnl matrix (the last column only containing zeros)
◆ IsValid()
| bool mitk::CameraIntrinsics::IsValid |
( |
| ) |
const |
- Returns
- true if the intrinsics are set (some plausibility checks may be done here)
◆ mitkClassMacroItkParent()
| mitk::CameraIntrinsics::mitkClassMacroItkParent |
( |
CameraIntrinsics |
, |
|
|
itk::Object |
|
|
) |
| |
◆ New()
| static Pointer mitk::CameraIntrinsics::New |
( |
| ) |
|
|
static |
◆ SetCameraMatrix()
| void mitk::CameraIntrinsics::SetCameraMatrix |
( |
const vnl_matrix_fixed< mitk::ScalarType, 3, 3 > & |
_CameraMatrix | ) |
|
set a new camera matrix utilizing a vnl matrix
◆ SetDistorsionCoeffs()
| void mitk::CameraIntrinsics::SetDistorsionCoeffs |
( |
double |
k1, |
|
|
double |
k2, |
|
|
double |
p1, |
|
|
double |
p2 |
|
) |
| |
◆ SetFocalLength()
| void mitk::CameraIntrinsics::SetFocalLength |
( |
double |
x, |
|
|
double |
y |
|
) |
| |
◆ SetIntrinsics() [1/2]
| void mitk::CameraIntrinsics::SetIntrinsics |
( |
const cv::Mat & |
_CameraMatrix, |
|
|
const cv::Mat & |
_DistorsionCoeffs |
|
) |
| |
◆ SetIntrinsics() [2/2]
◆ SetPrincipalPoint()
| void mitk::CameraIntrinsics::SetPrincipalPoint |
( |
double |
x, |
|
|
double |
y |
|
) |
| |
◆ SetValid()
| void mitk::CameraIntrinsics::SetValid |
( |
bool |
valid | ) |
|
◆ ToOctaveString()
| std::string mitk::CameraIntrinsics::ToOctaveString |
( |
const std::string & |
varName = "CameraIntrinsics" | ) |
|
◆ ToString()
| std::string mitk::CameraIntrinsics::ToString |
( |
| ) |
const |
◆ ToXML()
| void mitk::CameraIntrinsics::ToXML |
( |
tinyxml2::XMLElement * |
elem | ) |
const |
|
overridevirtual |
◆ m_CameraMatrix
| cv::Mat mitk::CameraIntrinsics::m_CameraMatrix |
|
protected |
◆ m_DistorsionCoeffs
| cv::Mat mitk::CameraIntrinsics::m_DistorsionCoeffs |
|
protected |
◆ m_Mutex
| std::mutex mitk::CameraIntrinsics::m_Mutex |
|
mutableprotected |
◆ m_Valid
| bool mitk::CameraIntrinsics::m_Valid |
|
protected |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from mitk::XMLSerializable
Public Member Functions inherited from mitk::XMLSerializable