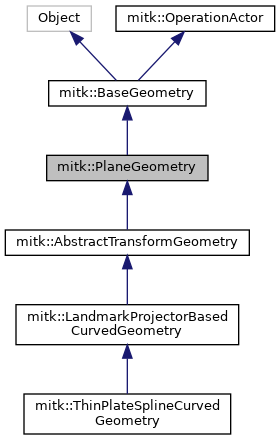
Describes a two-dimensional, rectangular plane. More...
#include <mitkPlaneGeometry.h>
Public Types | |
| typedef PlaneGeometry | Self |
| typedef BaseGeometry | Superclass |
| typedef itk::SmartPointer< Self > | Pointer |
| typedef itk::SmartPointer< const Self > | ConstPointer |
 Public Types inherited from mitk::BaseGeometry Public Types inherited from mitk::BaseGeometry | |
| typedef BaseGeometry | Self |
| typedef itk::Object | Superclass |
| typedef itk::SmartPointer< Self > | Pointer |
| typedef itk::SmartPointer< const Self > | ConstPointer |
| typedef GeometryTransformHolder::TransformType | TransformType |
| typedef itk::BoundingBox< unsigned long, 3, ScalarType > | BoundingBoxType |
| typedef BoundingBoxType::BoundsArrayType | BoundsArrayType |
| typedef BoundingBoxType::Pointer | BoundingBoxPointer |
Public Member Functions | |
| virtual std::vector< std::string > | GetClassHierarchy () const override |
| virtual const char * | GetClassName () const |
| Pointer | Clone () const |
| virtual void | IndexToWorld (const Point2D &pt_units, Point2D &pt_mm) const |
| virtual void | WorldToIndex (const Point2D &pt_mm, Point2D &pt_units) const |
| virtual void | IndexToWorld (const mitk::Point2D &atPt2d_untis, const mitk::Vector2D &vec_units, mitk::Vector2D &vec_mm) const |
| Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm) More... | |
| virtual void | IndexToWorld (const mitk::Vector2D &vec_units, mitk::Vector2D &vec_mm) const |
| Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm) For further information about coordinates types, please see the Geometry documentation. More... | |
| virtual void | WorldToIndex (const mitk::Point2D &atPt2d_mm, const mitk::Vector2D &vec_mm, mitk::Vector2D &vec_units) const |
| Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates. More... | |
| virtual void | WorldToIndex (const mitk::Vector2D &vec_mm, mitk::Vector2D &vec_units) const |
| Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates. For further information about coordinates types, please see the Geometry documentation. More... | |
| virtual void | InitializeStandardPlane (const BaseGeometry *geometry3D, AnatomicalPlane planeorientation=AnatomicalPlane::Axial, ScalarType zPosition=0, bool frontside=true, bool rotated=false, bool top=true) |
| Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to BaseGeometry (default: identity). Spacing also taken from BaseGeometry. More... | |
| virtual void | InitializeStandardPlane (const BaseGeometry *geometry3D, bool top, AnatomicalPlane planeorientation=AnatomicalPlane::Axial, bool frontside=true, bool rotated=false) |
| Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to BaseGeometry (default: identity). Spacing also taken from BaseGeometry. More... | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const AffineTransform3D *transform=nullptr, AnatomicalPlane planeorientation=AnatomicalPlane::Axial, ScalarType zPosition=0, bool frontside=true, bool rotated=false, bool top=true) |
| Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to transform (default: identity) given width and height in units. More... | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const Vector3D &spacing, AnatomicalPlane planeorientation=AnatomicalPlane::Axial, ScalarType zPosition=0, bool frontside=true, bool rotated=false, bool top=true) |
| Initialize plane with orientation AnatomicalPlane (default: axial) given width, height and spacing. More... | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const Vector3D &rightVector, const Vector3D &downVector, const Vector3D *spacing=nullptr) |
| Initialize plane by width and height in pixels, right-/down-vector (itk) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions). More... | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const VnlVector &rightVector, const VnlVector &downVector, const Vector3D *spacing=nullptr) |
| Initialize plane by width and height in pixels, right-/down-vector (vnl) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions). More... | |
| virtual void | InitializeStandardPlane (const Vector3D &rightVector, const Vector3D &downVector, const Vector3D *spacing=nullptr) |
| Initialize plane by right-/down-vector (itk) and spacing (default: 1.0 mm in all directions). More... | |
| virtual void | InitializeStandardPlane (const VnlVector &rightVector, const VnlVector &downVector, const Vector3D *spacing=nullptr) |
| Initialize plane by right-/down-vector (vnl) and spacing (default: 1.0 mm in all directions). More... | |
| virtual void | InitializePlane (const Point3D &origin, const Vector3D &normal) |
| Initialize plane by origin and normal (size is 1.0 mm in all directions, direction of right-/down-vector valid but undefined). More... | |
| void | SetMatrixByVectors (const VnlVector &rightVector, const VnlVector &downVector, ScalarType thickness=1.0) |
| Initialize plane by right-/down-vector. More... | |
| Vector3D | GetNormal () const |
| Normal of the plane. More... | |
| VnlVector | GetNormalVnl () const |
| Normal of the plane as VnlVector. More... | |
| virtual ScalarType | SignedDistance (const Point3D &pt3d_mm) const |
| virtual bool | IsAbove (const Point3D &pt3d_mm, bool considerBoundingBox=false) const |
| Calculates, whether a point is below or above the plane. There are two different calculation methods, with or without consideration of the bounding box. More... | |
| ScalarType | DistanceFromPlane (const Point3D &pt3d_mm) const |
| Distance of the point from the plane (bounding-box not considered) More... | |
| ScalarType | SignedDistanceFromPlane (const Point3D &pt3d_mm) const |
| Signed distance of the point from the plane (bounding-box not considered) More... | |
| ScalarType | DistanceFromPlane (const PlaneGeometry *plane) const |
| Distance of the plane from another plane (bounding-box not considered) More... | |
| ScalarType | SignedDistanceFromPlane (const PlaneGeometry *plane) const |
| Signed distance of the plane from another plane (bounding-box not considered) More... | |
| bool | IntersectionLine (const PlaneGeometry *plane, Line3D &crossline) const |
| Calculate the intersecting line of two planes. More... | |
| unsigned int | IntersectWithPlane2D (const PlaneGeometry *plane, Point2D &lineFrom, Point2D &lineTo) const |
| Calculate two points where another plane intersects the border of this plane. More... | |
| double | Angle (const PlaneGeometry *plane) const |
| Calculate the angle between two planes. More... | |
| double | Angle (const Line3D &line) const |
| Calculate the angle between the plane and a line. More... | |
| bool | IntersectionPoint (const Line3D &line, Point3D &intersectionPoint) const |
| Calculate intersection point between the plane and a line. More... | |
| bool | IntersectionPointParam (const Line3D &line, double &t) const |
| Calculate line parameter of intersection point between the plane and a line. More... | |
| bool | IsParallel (const PlaneGeometry *plane) const |
| Returns whether the plane is parallel to another plane. More... | |
| bool | IsOnPlane (const Point3D &point) const |
| Returns whether the point is on the plane (bounding-box not considered) More... | |
| bool | IsOnPlane (const Line3D &line) const |
| Returns whether the line is on the plane (bounding-box not considered) More... | |
| bool | IsOnPlane (const PlaneGeometry *plane) const |
| Returns whether the plane is on the plane (bounding-box not considered) More... | |
| Point3D | ProjectPointOntoPlane (const Point3D &pt) const |
| Returns the lot from the point to the plane. More... | |
| itk::LightObject::Pointer | InternalClone () const override |
| void | ExecuteOperation (Operation *operation) override |
| virtual bool | Map (const mitk::Point3D &pt3d_mm, mitk::Point2D &pt2d_mm) const |
| Project a 3D point given in mm (pt3d_mm) onto the 2D geometry. The result is a 2D point in mm (pt2d_mm). More... | |
| virtual void | Map (const mitk::Point2D &pt2d_mm, mitk::Point3D &pt3d_mm) const |
| Converts a 2D point given in mm (pt2d_mm) relative to the upper-left corner of the geometry into the corresponding world-coordinate (a 3D point in mm, pt3d_mm). More... | |
| virtual void | SetSizeInUnits (mitk::ScalarType width, mitk::ScalarType height) |
| Set the width and height of this 2D-geometry in units by calling SetBounds. This does not change the extent in mm! More... | |
| virtual bool | Project (const mitk::Point3D &pt3d_mm, mitk::Point3D &projectedPt3d_mm) const |
| Project a 3D point given in mm (pt3d_mm) onto the 2D geometry. The result is a 3D point in mm (projectedPt3d_mm). More... | |
| virtual bool | Map (const mitk::Point3D &atPt3d_mm, const mitk::Vector3D &vec3d_mm, mitk::Vector2D &vec2d_mm) const |
| Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 2D vector in mm (vec2d_mm). More... | |
| virtual void | Map (const mitk::Point2D &atPt2d_mm, const mitk::Vector2D &vec2d_mm, mitk::Vector3D &vec3d_mm) const |
| Converts a 2D vector given in mm (vec2d_mm) relative to the upper-left corner of the geometry into the corresponding world-coordinate (a 3D vector in mm, vec3d_mm). More... | |
| virtual bool | Project (const mitk::Point3D &atPt3d_mm, const mitk::Vector3D &vec3d_mm, mitk::Vector3D &projectedVec3d_mm) const |
| Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 3D vector in mm (projectedVec3d_mm). More... | |
| virtual bool | Project (const mitk::Vector3D &vec3d_mm, mitk::Vector3D &projectedVec3d_mm) const |
| Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 3D vector in mm (projectedVec3d_mm). More... | |
| ScalarType | Distance (const Point3D &pt3d_mm) const |
| Distance of the point from the geometry (bounding-box not considered) More... | |
| void | SetReferenceGeometry (const mitk::BaseGeometry *geometry) |
| Set the geometrical frame of reference in which this PlaneGeometry is placed. More... | |
| const BaseGeometry * | GetReferenceGeometry () const |
| Get the geometrical frame of reference for this PlaneGeometry. More... | |
| bool | HasReferenceGeometry () const |
| Public Member Functions inherited from mitk::BaseGeometry | |
| Pointer | Clone () const |
| const Point3D | GetOrigin () const |
| Get the origin, e.g. the upper-left corner of the plane. More... | |
| void | SetOrigin (const Point3D &origin) |
| Set the origin, i.e. the upper-left corner of the plane. More... | |
| const mitk::Vector3D | GetSpacing () const |
| Get the spacing (size of a pixel). More... | |
| void | SetSpacing (const mitk::Vector3D &aSpacing, bool enforceSetSpacing=false) |
| Set the spacing (m_Spacing). More... | |
| VnlVector | GetOriginVnl () const |
| Get the origin as VnlVector. More... | |
| virtual unsigned int | GetFrameOfReferenceID () const |
| Get the DICOM FrameOfReferenceID referring to the used world coordinate system. More... | |
| virtual void | SetFrameOfReferenceID (unsigned int _arg) |
| Set the DICOM FrameOfReferenceID referring to the used world coordinate system. More... | |
| virtual unsigned long | GetIndexToWorldTransformLastModified () const |
| void | Modified () const override |
| Overload of function Modified() to prohibit several calls of Modified() using the ModifiedLock class. More... | |
| virtual bool | IsValid () const |
| Is this BaseGeometry in a state that is valid? More... | |
| void | Initialize () |
| Initialize the BaseGeometry. More... | |
| void | InitializeGeometry (Self *newGeometry) const |
| mitk::AffineTransform3D * | GetIndexToWorldTransform () |
| Get the transformation used to convert from index to world coordinates. More... | |
| const mitk::AffineTransform3D * | GetIndexToWorldTransform () const |
| Get the transformation used to convert from index to world coordinates. More... | |
| void | SetIndexToWorldTransform (mitk::AffineTransform3D *transform) |
| void | SetIndexToWorldTransformByVtkMatrix (vtkMatrix4x4 *vtkmatrix) |
| Convenience method for setting the ITK transform (m_IndexToWorldTransform) via an vtkMatrix4x4.The spacing of the new transform is copied to m_spacing. More... | |
| void | SetIndexToWorldTransformWithoutChangingSpacing (mitk::AffineTransform3D *transform) |
| void | SetIndexToWorldTransformByVtkMatrixWithoutChangingSpacing (vtkMatrix4x4 *vtkmatrix) |
| Convenience method for setting the ITK transform (m_IndexToWorldTransform) via an vtkMatrix4x4. This function keeps the original spacing. More... | |
| vtkMatrix4x4 * | GetVtkMatrix () |
| const vtkMatrix4x4 * | GetVtkMatrix () const |
| vtkLinearTransform * | GetVtkTransform () const |
| Get the m_IndexToWorldTransform as a vtkLinearTransform. More... | |
| void | SetIdentity () |
| Set the transform to identity, the spacing to 1 and origin to 0. More... | |
| void | Compose (const TransformType *other, bool pre=false) |
| Compose new IndexToWorldTransform with a given transform. More... | |
| void | Compose (const vtkMatrix4x4 *vtkmatrix, bool pre=false) |
| Compose new IndexToWorldTransform with a given vtkMatrix4x4. More... | |
| void | Translate (const Vector3D &vector) |
| Translate the origin by a vector. More... | |
| void | WorldToIndex (const mitk::Point3D &pt_mm, mitk::Point3D &pt_units) const |
| Convert world coordinates (in mm) of a point to (continuous!) index coordinates. More... | |
| void | WorldToIndex (const mitk::Vector3D &vec_mm, mitk::Vector3D &vec_units) const |
| Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates. For further information about coordinates types, please see the Geometry documentation. More... | |
| template<unsigned int VIndexDimension> | |
| void | WorldToIndex (const mitk::Point3D &pt_mm, itk::Index< VIndexDimension > &index) const |
| Convert world coordinates (in mm) of a point to (discrete!) index coordinates. This method rounds to integer indices! For further information about coordinates types, please see the Geometry documentation. More... | |
| void | IndexToWorld (const mitk::Vector3D &vec_units, mitk::Vector3D &vec_mm) const |
| Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm) For further information about coordinates types, please see the Geometry documentation. More... | |
| void | IndexToWorld (const mitk::Point3D &pt_units, mitk::Point3D &pt_mm) const |
| Convert (continuous or discrete) index coordinates of a point to world coordinates (in mm) For further information about coordinates types, please see the Geometry documentation. More... | |
| template<unsigned int VIndexDimension> | |
| void | IndexToWorld (const itk::Index< VIndexDimension > &index, mitk::Point3D &pt_mm) const |
| Convert (discrete) index coordinates of a point to world coordinates (in mm) For further information about coordinates types, please see the Geometry documentation. More... | |
| void | IndexToWorld (const mitk::Point3D &atPt3d_units, const mitk::Vector3D &vec_units, mitk::Vector3D &vec_mm) const |
| Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm) More... | |
| void | WorldToIndex (const mitk::Point3D &atPt3d_mm, const mitk::Vector3D &vec_mm, mitk::Vector3D &vec_units) const |
| Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates. More... | |
| template<class TCoordRep > | |
| void | ItkPhysicalPointToWorld (const itk::Point< TCoordRep, 3 > &itkPhysicalPoint, mitk::Point3D &pt_mm) const |
| Deprecated for use with ITK version 3.10 or newer. Convert ITK physical coordinates of a point (in mm, but without a rotation) into MITK world coordinates (in mm) More... | |
| template<class TCoordRep > | |
| void | WorldToItkPhysicalPoint (const mitk::Point3D &pt_mm, itk::Point< TCoordRep, 3 > &itkPhysicalPoint) const |
| Deprecated for use with ITK version 3.10 or newer. Convert world coordinates (in mm) of a point to ITK physical coordinates (in mm, but without a possible rotation) More... | |
| virtual const BoundingBoxType * | GetBoundingBox () |
| const BoundsArrayType | GetBounds () const |
| void | SetBounds (const BoundsArrayType &bounds) |
| Set the bounding box (in index/unit coordinates) More... | |
| void | SetFloatBounds (const float bounds[6]) |
| Set the bounding box (in index/unit coordinates) via a float array. More... | |
| void | SetFloatBounds (const double bounds[6]) |
| Set the bounding box (in index/unit coordinates) via a double array. More... | |
| VnlVector | GetMatrixColumn (unsigned int direction) const |
| Get a VnlVector along bounding-box in the specified direction, length is spacing. More... | |
| mitk::BoundingBox::Pointer | CalculateBoundingBoxRelativeToTransform (const mitk::AffineTransform3D *transform) const |
| Calculates a bounding-box around the geometry relative to a coordinate system defined by a transform. More... | |
| ScalarType | GetExtent (unsigned int direction) const |
| Set the time bounds (in ms) More... | |
| ScalarType | GetExtentInMM (int direction) const |
| Get the extent of the bounding-box in the specified direction in mm. More... | |
| Vector3D | GetAxisVector (unsigned int direction) const |
| Get vector along bounding-box in the specified direction in mm. More... | |
| virtual bool | Is2DConvertable () |
| Checks, if the given geometry can be converted to 2D without information loss e.g. when a 2D image is saved, the matrix is usually cropped to 2x2, and when you load it back to MITK it will be filled with standard values. This function checks, if information would be lost during this procedure. More... | |
| Point3D | GetCenter () const |
| Get the center of the bounding-box in mm. More... | |
| double | GetDiagonalLength2 () const |
| Get the squared length of the diagonal of the bounding-box in mm. More... | |
| double | GetDiagonalLength () const |
| Get the length of the diagonal of the bounding-box in mm. More... | |
| Point3D | GetCornerPoint (int id) const |
| Get the position of the corner number id (in world coordinates) More... | |
| Point3D | GetCornerPoint (bool xFront=true, bool yFront=true, bool zFront=true) const |
| Get the position of a corner (in world coordinates) More... | |
| void | SetExtentInMM (int direction, ScalarType extentInMM) |
| Set the extent of the bounding-box in the specified direction in mm. More... | |
| bool | IsInside (const mitk::Point3D &p) const |
| Test whether the point p (world coordinates in mm) is inside the bounding box. More... | |
| bool | IsIndexInside (const mitk::Point3D &index) const |
| Test whether the point p ((continuous!)index coordinates in units) is inside the bounding box. More... | |
| template<unsigned int VIndexDimension> | |
| bool | IsIndexInside (const itk::Index< VIndexDimension > &index) const |
| Convenience method for working with ITK indices. More... | |
| virtual void | ChangeImageGeometryConsideringOriginOffset (const bool isAnImageGeometry) |
| When switching from an Image Geometry to a normal Geometry (and the other way around), you have to. More... | |
| virtual bool | GetImageGeometry () const |
| Is this an ImageGeometry? More... | |
| virtual void | SetImageGeometry (bool _arg) |
| Define that this BaseGeometry is referring to an Image. More... | |
| virtual void | ImageGeometryOn () |
| virtual void | ImageGeometryOff () |
| const GeometryTransformHolder * | GetGeometryTransformHolder () const |
| void | MapAxesToOrientations (int axes[]) const |
| One to one mapping of axes to world orientations. More... | |
| Public Member Functions inherited from mitk::OperationActor | |
| itkTypeMacroNoParent (OperationActor) virtual ~OperationActor() | |
Static Public Member Functions | |
| static const char * | GetStaticNameOfClass () |
| static Pointer | New () |
| static bool | CheckRotationMatrix (AffineTransform3D *transform, double epsilon=1e-6) |
| Check if matrix is a rotation matrix: More... | |
| Static Public Member Functions inherited from mitk::BaseGeometry | |
| static const char * | GetStaticNameOfClass () |
Protected Member Functions | |
| PlaneGeometry () | |
| PlaneGeometry (const PlaneGeometry &other) | |
| ~PlaneGeometry () override | |
| void | PrintSelf (std::ostream &os, itk::Indent indent) const override |
| void | PreSetSpacing (const mitk::Vector3D &aSpacing) override |
| PreSetSpacing. More... | |
| void | CheckBounds (const BoundsArrayType &bounds) override |
| CheckBounds. More... | |
| void | CheckIndexToWorldTransform (mitk::AffineTransform3D *transform) override |
| CheckIndexToWorldTransform. More... | |
| Protected Member Functions inherited from mitk::BaseGeometry | |
| BaseGeometry () | |
| BaseGeometry (const BaseGeometry &other) | |
| ~BaseGeometry () override | |
| void | PrintSelf (std::ostream &os, itk::Indent indent) const override |
| virtual unsigned int | GetNDimensions () const |
| bool | IsBoundingBoxNull () const |
| bool | IsIndexToWorldTransformNull () const |
| void | SetVtkMatrixDeepCopy (vtkTransform *vtktransform) |
| void | _SetSpacing (const mitk::Vector3D &aSpacing, bool enforceSetSpacing=false) |
Protected Attributes | |
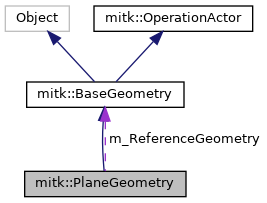
| const mitk::BaseGeometry * | m_ReferenceGeometry |
Additional Inherited Members | |
| Static Protected Member Functions inherited from mitk::BaseGeometry | |
| static const std::string | GetTransformAsString (TransformType *transformType) |
Detailed Description
Describes a two-dimensional, rectangular plane.
Definition at line 78 of file mitkPlaneGeometry.h.
Member Typedef Documentation
◆ ConstPointer
| typedef itk::SmartPointer<const Self> mitk::PlaneGeometry::ConstPointer |
Definition at line 81 of file mitkPlaneGeometry.h.
◆ Pointer
Definition at line 81 of file mitkPlaneGeometry.h.
◆ Self
Definition at line 81 of file mitkPlaneGeometry.h.
◆ Superclass
Definition at line 81 of file mitkPlaneGeometry.h.
Constructor & Destructor Documentation
◆ PlaneGeometry() [1/2]
|
protected |
◆ PlaneGeometry() [2/2]
|
protected |
◆ ~PlaneGeometry()
|
overrideprotected |
Member Function Documentation
◆ Angle() [1/2]
| double mitk::PlaneGeometry::Angle | ( | const Line3D & | line | ) | const |
Calculate the angle between the plane and a line.
- Returns
- angle in radiants
◆ Angle() [2/2]
| double mitk::PlaneGeometry::Angle | ( | const PlaneGeometry * | plane | ) | const |
Calculate the angle between two planes.
- Returns
- angle in radiants
◆ CheckBounds()
|
overrideprotectedvirtual |
CheckBounds.
This function is called in SetBounds. Assertions can be implemented in this function (see PlaneGeometry.cpp). If you implement this function in a subclass, make sure, that all classes were your class inherits from have an implementation of CheckBounds (e.g. inheritance BaseGeometry <- A <- B. Implementation of CheckBounds in class B needs implementation in A as
Reimplemented from mitk::BaseGeometry.
◆ CheckIndexToWorldTransform()
|
overrideprotectedvirtual |
CheckIndexToWorldTransform.
This function is called in SetIndexToWorldTransform. Assertions can be implemented in this function (see
Reimplemented from mitk::BaseGeometry.
◆ CheckRotationMatrix()
|
static |
Check if matrix is a rotation matrix:
- determinant is 1?
- R*R^T is ID? Output warning otherwise.
◆ Clone()
| Pointer mitk::PlaneGeometry::Clone | ( | ) | const |
◆ Distance()
|
inline |
Distance of the point from the geometry (bounding-box not considered)
Definition at line 540 of file mitkPlaneGeometry.h.
◆ DistanceFromPlane() [1/2]
|
inline |
Distance of the plane from another plane (bounding-box not considered)
Result is 0 if planes are not parallel.
Definition at line 341 of file mitkPlaneGeometry.h.
◆ DistanceFromPlane() [2/2]
| ScalarType mitk::PlaneGeometry::DistanceFromPlane | ( | const Point3D & | pt3d_mm | ) | const |
Distance of the point from the plane (bounding-box not considered)
◆ ExecuteOperation()
|
overridevirtual |
Implements operation to re-orient the plane
Reimplemented from mitk::BaseGeometry.
◆ GetClassHierarchy()
|
inlineoverridevirtual |
Reimplemented from mitk::BaseGeometry.
Reimplemented in mitk::LandmarkProjectorBasedCurvedGeometry, and mitk::ThinPlateSplineCurvedGeometry.
Definition at line 81 of file mitkPlaneGeometry.h.
◆ GetClassName()
|
virtual |
Reimplemented from mitk::BaseGeometry.
Reimplemented in mitk::LandmarkProjectorBasedCurvedGeometry, and mitk::ThinPlateSplineCurvedGeometry.
◆ GetNormal()
| Vector3D mitk::PlaneGeometry::GetNormal | ( | ) | const |
Normal of the plane.
◆ GetNormalVnl()
| VnlVector mitk::PlaneGeometry::GetNormalVnl | ( | ) | const |
Normal of the plane as VnlVector.
◆ GetReferenceGeometry()
| const BaseGeometry* mitk::PlaneGeometry::GetReferenceGeometry | ( | ) | const |
Get the geometrical frame of reference for this PlaneGeometry.
◆ GetStaticNameOfClass()
|
inlinestatic |
Definition at line 81 of file mitkPlaneGeometry.h.
◆ HasReferenceGeometry()
| bool mitk::PlaneGeometry::HasReferenceGeometry | ( | ) | const |
◆ IndexToWorld() [1/3]
|
virtual |
Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm)
- Deprecated:
- First parameter (Point2D) is not used. If possible, please use void IndexToWorld(const
Reimplemented in mitk::AbstractTransformGeometry.
◆ IndexToWorld() [2/3]
|
virtual |
Convert (continuous or discrete) index coordinates of a vector vec_units to world coordinates (in mm) For further information about coordinates types, please see the Geometry documentation.
Reimplemented in mitk::AbstractTransformGeometry.
◆ IndexToWorld() [3/3]
|
virtual |
Reimplemented in mitk::AbstractTransformGeometry.
◆ InitializePlane()
|
virtual |
Initialize plane by origin and normal (size is 1.0 mm in all directions, direction of right-/down-vector valid but undefined).
- Warning
- This function can only produce righthanded coordinate orientation, not lefthanded.
◆ InitializeStandardPlane() [1/8]
|
virtual |
Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to BaseGeometry (default: identity). Spacing also taken from BaseGeometry.
- Warning
- A former version of this method created a geometry with unit spacing. For unit spacing use
◆ InitializeStandardPlane() [2/8]
|
virtual |
Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to BaseGeometry (default: identity). Spacing also taken from BaseGeometry.
- Parameters
-
geometry3D top if true, create plane at top, otherwise at bottom (for AnatomicalPlane Axial, for other plane locations respectively) planeorientation frontside rotated
◆ InitializeStandardPlane() [3/8]
|
virtual |
Initialize plane by right-/down-vector (itk) and spacing (default: 1.0 mm in all directions).
The length of the right-/-down-vector is used as width/height in units, respectively. Then, the vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
◆ InitializeStandardPlane() [4/8]
|
virtual |
Initialize plane by right-/down-vector (vnl) and spacing (default: 1.0 mm in all directions).
The length of the right-/-down-vector is used as width/height in units, respectively. Then, the vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
◆ InitializeStandardPlane() [5/8]
|
virtual |
Initialize a plane with orientation AnatomicalPlane (default: axial) with respect to transform (default: identity) given width and height in units.
Rotated means rotated by 180 degrees (1/2 rotation) within the plane. Rotation by 90 degrees (1/4 rotation) is not implemented as of now.
Frontside/Backside: Viewed from below = frontside in the axial case; (radiologist's view versus neuro-surgeon's view, see: http://www.itk.org/Wiki/images/e/ed/DICOM-OrientationDiagram-Radiologist-vs-NeuroSurgeon.png ) Viewed from front = frontside in the coronal case; Viewed from left = frontside in the sagittal case.
Cave/Caution: Currently only RPI, LAI, LPS and RAS in the three standard planes are covered, i.e. 12 cases of 144: 3 standard planes * 48 coordinate orientations = 144 cases.
◆ InitializeStandardPlane() [6/8]
|
virtual |
Initialize plane by width and height in pixels, right-/down-vector (itk) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions).
The vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
This overloaded version of InitializeStandardPlane() creates only righthanded coordinate orientations, unless spacing contains 1 or 3 negative entries.
◆ InitializeStandardPlane() [7/8]
|
virtual |
Initialize plane with orientation AnatomicalPlane (default: axial) given width, height and spacing.
◆ InitializeStandardPlane() [8/8]
|
virtual |
Initialize plane by width and height in pixels, right-/down-vector (vnl) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions).
The vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
This overloaded version of InitializeStandardPlane() creates only righthanded coordinate orientations, unless spacing contains 1 or 3 negative entries.
◆ InternalClone()
|
overridevirtual |
Implements mitk::BaseGeometry.
Reimplemented in mitk::ThinPlateSplineCurvedGeometry.
◆ IntersectionLine()
| bool mitk::PlaneGeometry::IntersectionLine | ( | const PlaneGeometry * | plane, |
| Line3D & | crossline | ||
| ) | const |
Calculate the intersecting line of two planes.
- Returns
- true planes are intersecting
- false planes do not intersect
◆ IntersectionPoint()
| bool mitk::PlaneGeometry::IntersectionPoint | ( | const Line3D & | line, |
| Point3D & | intersectionPoint | ||
| ) | const |
Calculate intersection point between the plane and a line.
- Parameters
-
line intersectionPoint intersection point
- Returns
- true if unique intersection exists, i.e., if line is not on or parallel to the plane
◆ IntersectionPointParam()
| bool mitk::PlaneGeometry::IntersectionPointParam | ( | const Line3D & | line, |
| double & | t | ||
| ) | const |
Calculate line parameter of intersection point between the plane and a line.
- Parameters
-
line t parameter of line: intersection point is line.GetPoint()+t*line.GetDirection()
- Returns
- true if unique intersection exists, i.e., if line is not on or parallel to the plane
◆ IntersectWithPlane2D()
| unsigned int mitk::PlaneGeometry::IntersectWithPlane2D | ( | const PlaneGeometry * | plane, |
| Point2D & | lineFrom, | ||
| Point2D & | lineTo | ||
| ) | const |
Calculate two points where another plane intersects the border of this plane.
- Returns
- number of intersection points (0..2). First interection point (if existing) is returned in lineFrom, second in lineTo.
◆ IsAbove()
|
virtual |
Calculates, whether a point is below or above the plane. There are two different calculation methods, with or without consideration of the bounding box.
Reimplemented in mitk::AbstractTransformGeometry.
◆ IsOnPlane() [1/3]
| bool mitk::PlaneGeometry::IsOnPlane | ( | const Line3D & | line | ) | const |
Returns whether the line is on the plane (bounding-box not considered)
◆ IsOnPlane() [2/3]
| bool mitk::PlaneGeometry::IsOnPlane | ( | const PlaneGeometry * | plane | ) | const |
Returns whether the plane is on the plane (bounding-box not considered)
- Returns
- true if the normal vector of the planes point to the same or the exactly oposit direction and the distance of the planes is < eps
◆ IsOnPlane() [3/3]
| bool mitk::PlaneGeometry::IsOnPlane | ( | const Point3D & | point | ) | const |
Returns whether the point is on the plane (bounding-box not considered)
◆ IsParallel()
| bool mitk::PlaneGeometry::IsParallel | ( | const PlaneGeometry * | plane | ) | const |
Returns whether the plane is parallel to another plane.
- Returns
- true iff the normal vectors both point to the same or exactly oposit direction
◆ Map() [1/4]
|
virtual |
Converts a 2D vector given in mm (vec2d_mm) relative to the upper-left corner of the geometry into the corresponding world-coordinate (a 3D vector in mm, vec3d_mm).
To convert a 2D vector given in units (e.g., pixels in case of an image) into a 2D vector given in mm (as required by this method), use IndexToWorld.
Reimplemented in mitk::AbstractTransformGeometry.
◆ Map() [2/4]
|
virtual |
Converts a 2D point given in mm (pt2d_mm) relative to the upper-left corner of the geometry into the corresponding world-coordinate (a 3D point in mm, pt3d_mm).
To convert a 2D point given in units (e.g., pixels in case of an image) into a 2D point given in mm (as required by this method), use IndexToWorld.
Reimplemented in mitk::AbstractTransformGeometry.
◆ Map() [3/4]
|
virtual |
Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 2D vector in mm (vec2d_mm).
The result is a 2D vector in mm (vec2d_mm) relative to the upper-left corner of the geometry. To convert this point into units (e.g., pixels in case of an image), use WorldToIndex.
- Returns
- true projection was possible
- See also
- Project(const mitk::Vector3D &vec3d_mm, mitk::Vector3D &projectedVec3d_mm)
Reimplemented in mitk::AbstractTransformGeometry.
◆ Map() [4/4]
|
virtual |
Project a 3D point given in mm (pt3d_mm) onto the 2D geometry. The result is a 2D point in mm (pt2d_mm).
The result is a 2D point in mm (pt2d_mm) relative to the upper-left corner of the geometry. To convert this point into units (e.g., pixels in case of an image), use WorldToIndex.
- Returns
- true projection was possible
- See also
- Project(const mitk::Point3D &pt3d_mm, mitk::Point3D &projectedPt3d_mm)
Reimplemented in mitk::AbstractTransformGeometry.
◆ New()
|
static |
Method for creation through the object factory.
◆ PreSetSpacing()
|
inlineoverrideprotectedvirtual |
PreSetSpacing.
These virtual function allows a different beahiour in subclasses. Do implement them in every subclass of BaseGeometry. If not needed, use {Superclass::PreSetSpacing();};
Reimplemented from mitk::BaseGeometry.
Reimplemented in mitk::ThinPlateSplineCurvedGeometry.
Definition at line 573 of file mitkPlaneGeometry.h.
◆ PrintSelf()
|
overrideprotected |
◆ Project() [1/3]
|
virtual |
Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 3D vector in mm (projectedVec3d_mm).
DEPRECATED. Use Project(vector,vector) instead
- Returns
- true projection was possible
Reimplemented in mitk::AbstractTransformGeometry.
◆ Project() [2/3]
|
virtual |
Project a 3D point given in mm (pt3d_mm) onto the 2D geometry. The result is a 3D point in mm (projectedPt3d_mm).
- Returns
- true projection was possible
Reimplemented in mitk::AbstractTransformGeometry.
◆ Project() [3/3]
|
virtual |
Project a 3D vector given in mm (vec3d_mm) onto the 2D geometry. The result is a 3D vector in mm (projectedVec3d_mm).
- Returns
- true projection was possible
Reimplemented in mitk::AbstractTransformGeometry.
◆ ProjectPointOntoPlane()
Returns the lot from the point to the plane.
◆ SetMatrixByVectors()
| void mitk::PlaneGeometry::SetMatrixByVectors | ( | const VnlVector & | rightVector, |
| const VnlVector & | downVector, | ||
| ScalarType | thickness = 1.0 |
||
| ) |
Initialize plane by right-/down-vector.
- Warning
- The vectors are set into the matrix as they are, without normalization! This function creates a righthanded IndexToWorldTransform, only a negative thickness could still make it lefthanded.
◆ SetReferenceGeometry()
| void mitk::PlaneGeometry::SetReferenceGeometry | ( | const mitk::BaseGeometry * | geometry | ) |
Set the geometrical frame of reference in which this PlaneGeometry is placed.
This would usually be the BaseGeometry of the underlying dataset, but setting it is optional.
◆ SetSizeInUnits()
|
virtual |
Set the width and height of this 2D-geometry in units by calling SetBounds. This does not change the extent in mm!
For an image, this is the number of pixels in x-/y-direction.
- Note
- In contrast to calling SetBounds directly, this does not change the extent in mm!
◆ SignedDistance()
|
virtual |
◆ SignedDistanceFromPlane() [1/2]
|
inline |
Signed distance of the plane from another plane (bounding-box not considered)
Result is 0 if planes are not parallel.
Definition at line 348 of file mitkPlaneGeometry.h.
References mitk::BaseGeometry::GetOrigin().
◆ SignedDistanceFromPlane() [2/2]
|
inline |
Signed distance of the point from the plane (bounding-box not considered)
0 : point is in the direction of the direction vector.
Definition at line 325 of file mitkPlaneGeometry.h.
◆ WorldToIndex() [1/3]
|
virtual |
Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates.
- Deprecated:
- First parameter (Point2D) is not used. If possible, please use void WorldToIndex(const
Reimplemented in mitk::AbstractTransformGeometry.
◆ WorldToIndex() [2/3]
|
virtual |
Convert world coordinates (in mm) of a vector vec_mm to (continuous!) index coordinates. For further information about coordinates types, please see the Geometry documentation.
Reimplemented in mitk::AbstractTransformGeometry.
◆ WorldToIndex() [3/3]
|
virtual |
Reimplemented in mitk::AbstractTransformGeometry.
Member Data Documentation
◆ m_ReferenceGeometry
|
protected |
Definition at line 565 of file mitkPlaneGeometry.h.
The documentation for this class was generated from the following file:

{kind=link}